상단 피드백 저항에 접근할 수 없는 경우의 루프 응답 측정 방법에 대해 아나로그디바이스(ADI)의 아담 허프와 조지 치안이 이야기한다.
“상단 피드백 저항 없이도 루프 분석 가능”
LTM4702, 전류 레퍼런스 회로 사용 상단 피드백 저항 無
VOSNS 핀 사용 시, 루프 응답 측정 기존 측정 방식 비슷
이 글에서는 전원 공급 장치에 명확한 주입 지점이 없을 때, 즉, 접근할 수 없거나 상단 피드백 저항이 없는 경우, 루프 응답을 측정하는 방법에 대해 자세히 설명한다. 이러한 상황은 다음과 같은 두 가지 경우에 발생할 수 있다. 하나는 전원 공급 모듈 내부에 접근할 수 없는 상단 피드백 저항이 있는 경우이고, 다른 하나는 출력 감지 핀만 있고 상단 피드백 저항이 없는 경우이다.
■ 전원공급장치 안정 동작 특정 이득·위상 마진 필요
전원 공급 장치가 안정적으로 동작하려면 특정 이득 및 위상 마진(여유)이 필요하다. 일반적으로 전원 공급 장치가 안정적인 것으로 간주되려면 최소 45°의 위상 마진(phase margin)과 최소 10dB의 이득 마진(gain margin)이 요구된다.
이러한 값은 일반적으로 VOUT 노드와 상단 피드백 저항 사이에 작은 저항을 삽입하고, 이 추가된 저항에 교란 신호(perturbation signal)를 인가한 후, 원하는 주파수 범위에서 루프 응답을 측정함으로써 구할 수 있다.
이 전통적인 방식은 사용자가 상단 피드백 저항에 접근할 수 있는 경우, 쉽게 측정이 가능하기 때문에 선호되고 있다.
하지만 상단 피드백 저항이 몰딩된 모듈 내부에 있어 접근이 불가능할 경우에는 루프 응답을 어떻게 측정할 수 있을까?
또한 디바이스가 상단 피드백 저항을 필요로 하지 않고, 그 대신 출력 전압 감지 핀을 사용하는 경우에는 루프 응답을 어떻게 측정할까?
이 글에서는 루프 응답 측정을 위한 기존의 접근 방식과 새로운 측정 방식의 보드 플롯(bode plot)을 비교함으로써 이러한 질문에 대한 답을 제시할 것이다.
■ 상단 피드백 저항의 위치
그림 1에서 볼 수 있듯이, 기존의 루프 응답 측정 방법은 VOUT 노드와 상단 피드백 저항 사이에 작은 값의 저항을 삽입하는 것이다. 이 방법은 상단 피드백 저항에 접근이 가능할 때만 활용할 수 있다.
.jpg)
▲그림 1. LT8608을 활용해 루프 응답을 측정하기 위해 추가된 저항을 보여주는 회로도
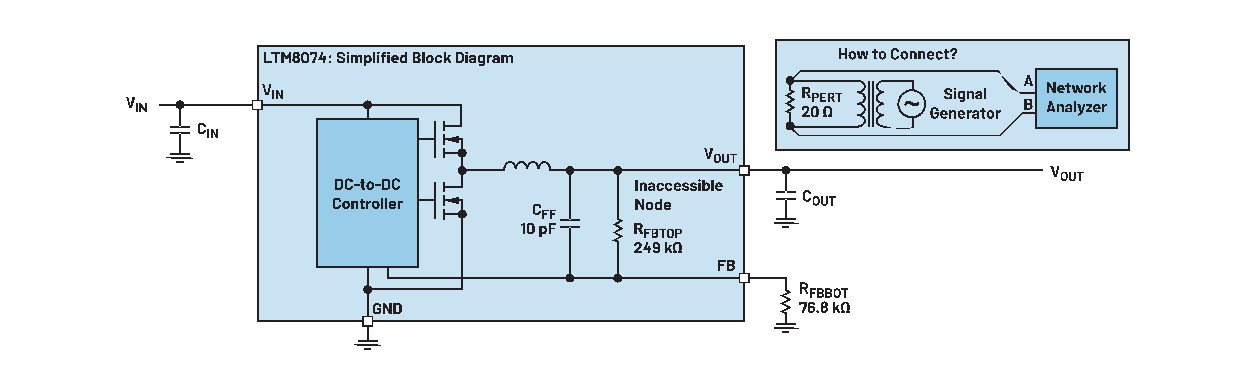
▲그림 2. 접근이 불가능한 상단 피드백 저항을 보여주는 예시 회로
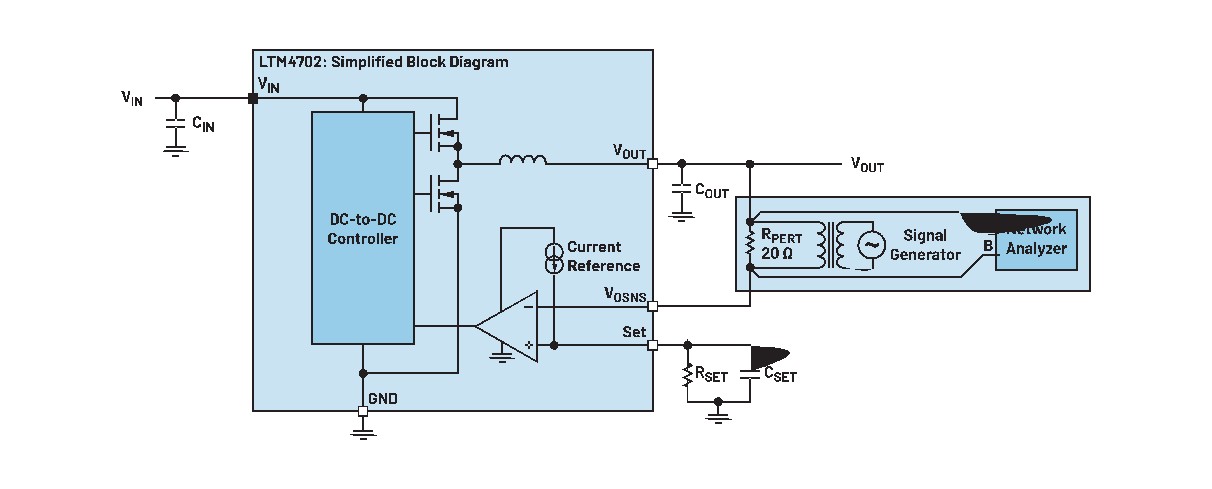
▲그림 3. VOSNS 회로를 보여주는 간단한 블록 다이어그램
전원 모듈 제품들 중에는 상단 피드백 저항이 전원 모듈 패키지 내부에 있어 접근이 불가능한 경우가 많다. 만약 상단 피드백 저항이 VOUT 노드에 고정되어 있다면, 출력 전압은 피드백 저항 분할로 설정된 전압보다 높아져서는 안 된다. 만약 상단 피드백 저항이 고정되어 있지 않다면, 해당 저항이 제대로 연결되어 있지 않거나 단선될 경우, VOUT 노드는 벅 레귤레이터의 입력 전압(VIN)만큼 높아질 수 있다.
아나로그디바이스(Analog Devices)의 많은 μModule® 제품군들은 이러한 추가적인 보호를 위해 상단 피드백 저항이 모듈 내부에 몰딩되어 있다. 하지만 이 경우, 기존 방법으로는 루프 응답을 측정할 수가 없다. 그림 2는 이처럼 접근이 불가능한 상단 피드백 저항을 갖고 있는 LTM8074를 보여준다.
또 다른 특이한 경우는 모듈이 출력 전압 감지 핀(VOSNS)을 사용하여 VOUT 전압을 조절하는 경우이다. 그림 3의 간략화 한 블록 다이어그램에서 볼 수 있듯이, 이 구성은 일반적인 전압 레퍼런스 대신 전류 레퍼런스를 사용하기 때문에 상단 피드백 저항이 없다. LTM4702는 이 전류 레퍼런스 회로를 사용하여 출력 전압을 조절한다.
■ 부하 과도 응답 vs 보드 플롯
전원 공급 장치의 루프 응답을 측정할 방법이 없다면, 안정성을 판단하기 위해 시스템의 과도 응답에 의존할 수밖에 없다. 과도 응답 테스트는 부하 스텝(load step)이 VOUT 노드에 인가될 때의 VOUT 응답을 관찰한다. 그림 4는 과도 응답을 예시한 것이다.
이 파형에서 대역폭(ƒBW)은 부하 스텝이 인가된 시점부터 출력 전압이 회복되기 시작할 때까지 걸리는 시간을 측정함으로써 추정할 수 있다. 제어 루프의 대역폭은 ‘회복 시간(tr) x π(pi)의 역’으로 구한다. 이 예시에서는 회복 시간이 약 4µs이고, 대역폭은 80kHz다.
또한, 시스템의 안정성은 파형의 형태를 보고 추정할 수 있다.
파형에 링잉(ringing)이 나타나는 경우(초록색 응답), 해당 시스템은 저감쇠(underdamped) 응답을 갖는다.
이는 시스템이 불안정하고 위상 마진이 낮을 수 있다는 것을 의미한다. 하지만 이때 위상 마진은 얼마나 낮은 것일까?
만약 파형의 회복 시간이 상당히 오래 걸린다면, 해당 응답은 과도 감쇠(overdamped)된 것(파란색 응답)으로 간주할 수 있다. 이 경우에는 시스템이 출력 전압을 회복하는 데 너무 오랜 시간이 걸릴 수 있다. 그러면 전압 강하(voltage drooping)가 장시간 지속되어 다운스트림 회로에 영향이 미칠 수 있다.
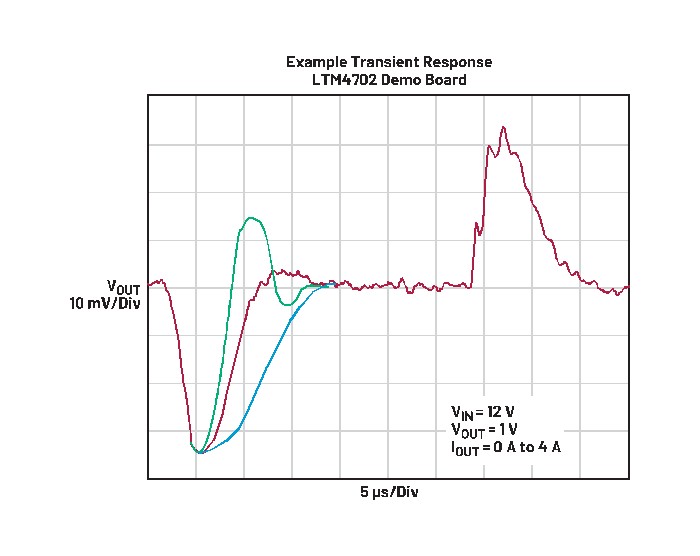
▲그림 4. 과도 응답 예시
비록 과도 응답이 시스템의 루프 응답에 대한 단서를 제공할 수는 있다고 하더라도, 정확한 위상 마진과 이득 마진은 측정을 통해서만 알 수 있다.
■ 새로운 루프 안정성 측정 방법
출력 전압 감지 핀(VOSNS 핀)이 사용되는 경우, 루프 응답 측정은 기존 측정 방식과 비슷하다. VOUT 노드와 VOSNS 핀 사이에 작은 값의 저항을 하나 연결하고, 이 저항에 교란 신호를 그림3와 같이 인가한 후, 루프 응답을 측정하면 된다.
상단 피드백 저항이 모듈 내부에 있어 접근할 수 없는 경우, 이 새로운 루프 측정 기법을 활용할 때 약간의 주의가 필요하다. 그림 5와 같이, 병렬 저항 분할 네트워크를 설치하고, 교란 신호는 이제 하단 피드백 저항과 접지 사이에 삽입된 저항에 인가된다. 측정 오류를 최소화하기 위해, 병렬 저항 분할 네트워크는 피드백 저항 네트워크와 최대한 가깝게 유지되도록 유의해야 한다.
1 단계: 20Ω RPERT 저항을 R2와 접지 사이에 삽입한다. 교란 신호를 RPERT에 인가한다
2 단계: R4는 500Ω ~ 1kΩ 사이에서 선택한다. ('참고 1' 참조)
3 단계: 병렬 저항 분할 네트워크 비율을 계산한다. n = R2/R4
4 단계: 3단계에서 구한 비율 'n'을 이용해 R3와 CFF2 를 계산한다.
5 단계: 교란 신호로 인한 추가 커패시턴스의 영향을 무효화하기 위해 피드포워드(feedforward) 커패시터와 커패시터(CM)를 포함하는 병렬 저항 분할 네트워크를 재구성한다.(‘참고 2’ 참조)
공식:
1. n = R2/R4
2. R3 = R1/n
3. CFF2 = n × CFF1
4. CM = n × CPERT
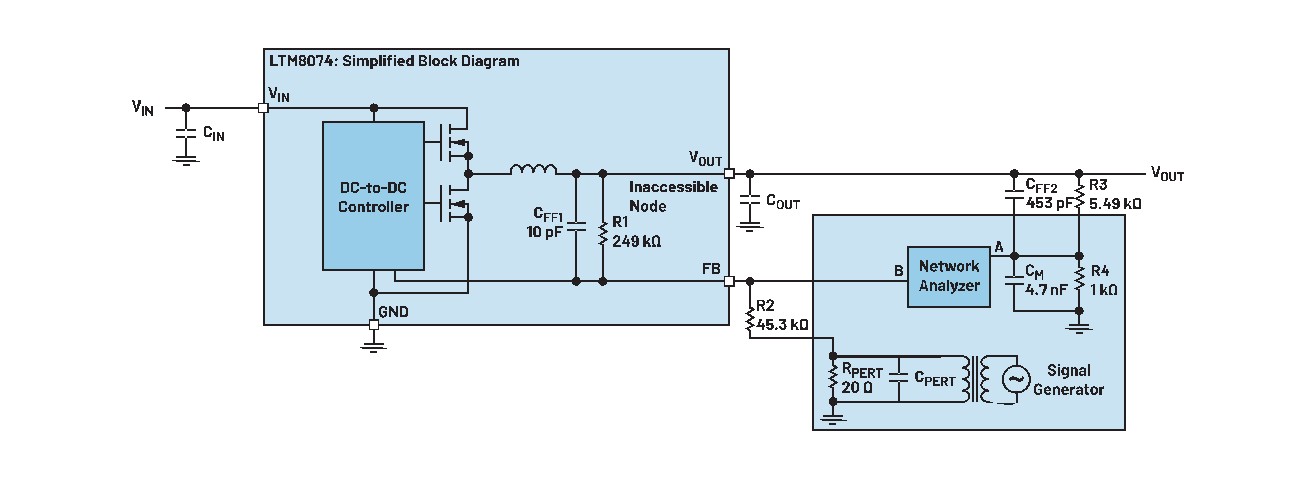
▲그림 5. 새로운 루프 응답 측정 방법
참고 2: 만약 교란 신호의 기생 커패시턴스를 신뢰성 있게 측정할 수 없다면, CM 커패시턴스는 반복 실험을 통해 경험적으로 결정할 수 있다.
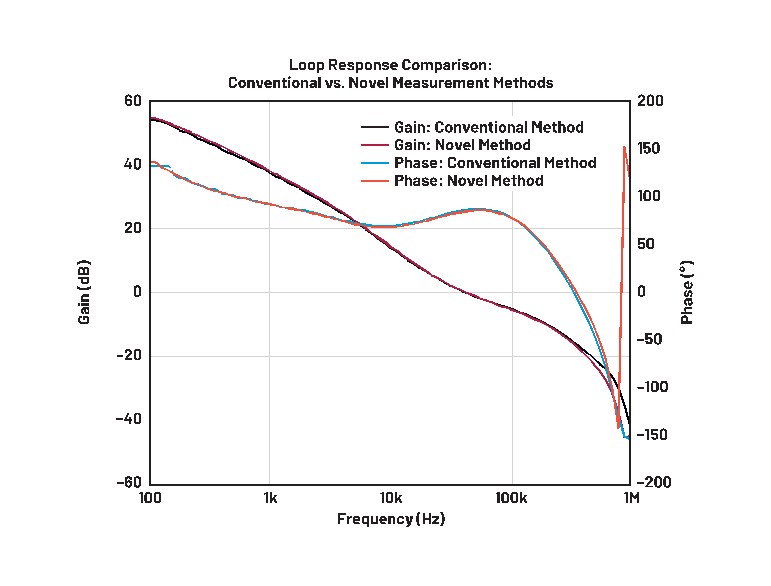
▲그림 6. 기존 측정 방법과 새로운 측정 방법의 보드 플롯 비교
새로운 측정 방법은 그림 6에 표시된 기존 접근 방식과 동일한 루프 응답을 제공한다.
■ 상단 피드백 저항에 접근하지 않고도 루프 응답 파악
이 새로운 측정 방식을 사용하여, 사용자는 이제 상단 피드백 저항에 접근하지 않고도 루프 응답을 파악할 수 있다. 사용자는 더 이상 제한된 대역폭과 상당한 오류를 갖는 미흡한 방법을 사용할 필요가 없다. 또한 부하 과도 응답을 살피는 것만으로 루프 안정성을 추정할 필요도 없다.
※ 저자 소개
아담 허프(Adam Huff)는 아나로그디바이스(Analog Devices) 전원 모듈 그룹의 선임 설계 엔지니어다. 2005년에 ADI에 입사 후 다양한 직책을 거쳤으며, 퍼듀대학교에서 전기공학기술 학사 학위를 취득했다.
조지 지준 치안(Geroge (Zhijun) Qian)은 아나로그디바이스의 전력 모듈 설계 담당 선임 매니저이다. 그는 모든 LTM80xx 제품과 LTM46xx/LTM47xx 일부 제품을 담당하고 있다. 저장대학교에서 학사 및 석사학위를 취득했으며, 센트럴 플로리다대학교에서 전력전자 박사 학위를 취득했다. 2010년 초에 ADI에 입사했다.


.jpg)
.jpg)
.jpg)