UNIST, 눈동자 움직임으로 로봇팔 제어하는 스마트 콘택트렌즈 개발
기사입력 2026.04.15 16:41
렌즈 위 100개 광센서와 AI 신호 복원 결합
안구 모형 실험서 방향 인식 정확도 99.3%
UNIST에 따르면 이번 연구 결과는 2026년 3월 재료과학 분야 학술지 Advanced Functional Materials에 게재됐다. 논문 제목은 ‘Meniscus Pixel Printing for Contact-Lens Vision Sensing and Robotic Control’이다.
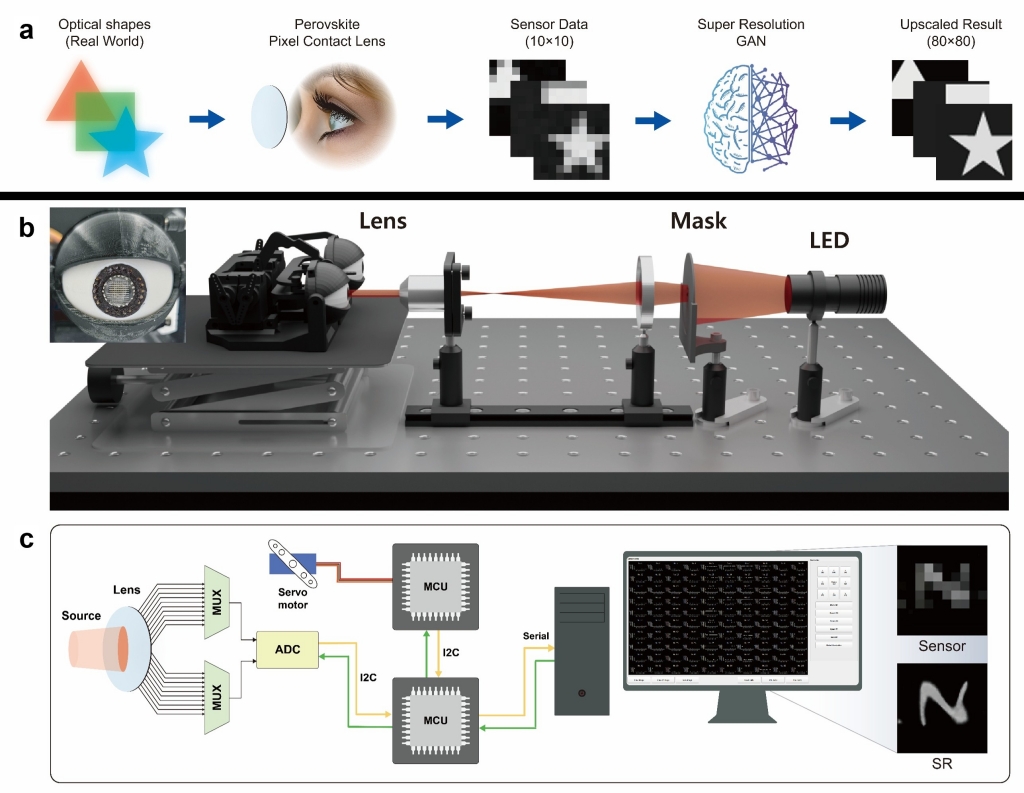
이 스마트 콘택트렌즈는 렌즈 위에 집적된 10×10 배열의 광센서 100개를 통해 눈의 움직임에 따라 달라지는 빛 분포를 읽어 시선 방향을 추적하는 방식으로 작동한다. 위·아래·좌·우는 물론 대각선까지 구분할 수 있고, 깜박임은 별도 명령으로 인식해 로봇팔이 물체를 집는 동작까지 수행하도록 설계됐다.
연구팀은 곡면인 렌즈 표면에 센서를 직접 구현하기 위해 ‘메니스커스 픽셀 프린팅(MPP)’ 기술을 적용했다. 마스크나 복잡한 다단계 공정 없이도 곡률이 있는 표면에 센서 패턴을 형성할 수 있어, 기존 평면 중심 제작 방식의 한계를 줄이는 데 초점을 맞췄다.
좁은 렌즈 면적 탓에 발생하는 낮은 신호 해상도는 인공지능으로 보완했다. 실제 센서는 100개지만, 딥러닝 기반 초해상도 복원 모델을 통해 10×10 입력을 80×80 수준의 광학 정보로 재구성했고, 지연 시간은 0.03초로 제시됐다.
안구 모형을 활용한 실험에서는 눈동자 움직임만으로 로봇팔이 물체를 집어 옮기는 동작이 구현됐다. 연구팀은 9개 방향의 시선 제스처 인식 정확도가 99.3%였다고 밝혔다. 이는 렌즈처럼 작은 장치 안에서도 센서 공정과 AI 신호 복원 기술을 결합해 제어 성능을 확보할 수 있음을 보여주는 결과로 읽힌다.
이번 연구의 제1저자는 공병훈, 김도현 연구원이며, 논문 저자로 정임두 교수가 함께 이름을 올렸다. 연구는 한국연구재단 등 정부 지원을 받아 수행됐다.

관련뉴스
-

UNIST, 피아노 손동작 읽는 AI 음악학습 기술로 세계 무대 주목
UNIST 디자인학과 엄홍열 교수 연구팀이 영국 뮤직테크 기업 ROLI와 협업해 피아노 연주자의 손동작을 실시간으로 읽고 즉시 피드백을 제공하는 음악 학습 기술 개발에 참여했다. 해당 기술이 적용된 ‘ROLI Piano’와 ‘ROLI Airwave’는 CES 혁신상과 iF 디자인상을 받았으며, 미국 타임지가 선정한 ‘더 베스트 인벤션스’에도 이름을 올렸다. 손 위치와 타이밍, 제스처를 분석해 학습자에게 맞춤형 피드백을 제공하는 방식으로, 음악 교육을 데이터 기반 상호작용형 경험으로 확장했다는 평가를 받고 있다.
2026-03-18 오후 2:57:51by 배종인 기자
-
UNIST, 전압으로 제어해도 에너지 흔들림 줄인 단일양자광원 개발
UNIST 연구진이 전압으로 켜고 끌 수 있으면서도 광자 에너지 변화는 크게 줄인 고순도 단일양자광원을 개발했다. 연구팀은 실리콘 나노 피라미드 위에 2차원 반도체 WSe₂를 올리고, 그 사이에 미세한 공기층과 절연층을 형성해 전기장 영향을 낮추는 구조를 제안했다. 이 방식으로 전기적 제어 과정에서 나타나는 스타크 효과를 억제하고, 단일광자 순도도 개선했다. 이번 성과는 실리콘 공정과 결합한 양자컴퓨팅, 양자통신, 양자광학 센서 분야의 칩형 소자 개발 가능성을 넓힌 것으로 평가된다.
2026-03-23 오전 10:54:05by 배종인 기자
-

원자력연·UNIST, 방사성 세슘 제거용 박리형 제염 코팅 개발
한국원자력연구원과 UNIST가 방사성 세슘 제거용 박리형 제염 코팅을 공동 개발했다. 연구진에 따르면 이 코팅은 스테인리스강 표면 실험에서 94.9%의 제거 효율을 보였고, 기존 상용 제품에 비해 작업 시간을 약 24시간에서 3시간으로 줄였다. 홍합 접착 단백질에서 유래한 카테콜을 폴리우레탄 말단에 적용한 것이 핵심이다. 오염 표면에 코팅제를 바른 뒤 건조한 막을 벗겨내는 방식으로, 사용 후 폐기물을 다시 녹여 방사성 물질을 분리하는 후처리 가능성도 함께 제시됐다. 연구 결과는 2026년 3월 재료과학 학술지 Materials Horizons에 온라인 게재됐다.
2026-03-26 오후 2:24:26by 명세환 기자
-
UNIST, 폐태양광 패널로 수소·실리카 생산 기술 개발
UNIST 연구팀이 폐태양광 패널 속 실리콘을 활용해 고순도 수소와 산업용 실리카를 동시에 생산하는 기술을 개발했다. 기존 방식보다 최대 5배 높은 효율을 기록했으며, 경제성과 친환경성을 동시에 확보했다는 점에서 주목된다. 이번 연구 결과는 국제 학술지 Joule에 공개돼 향후 산업적 적용 가능성이 기대된다.
2026-04-06 오후 4:21:20by 배종인 기자
-

UNIST, 조선업 AI 전환 연구 본격화…조선 특화 초거대 산업 AI 개발 착수
UNIST가 과학기술정보통신부 ‘초거대산업 AI 연구지원사업’ 조선 분야 총괄연구기관으로 선정돼 조선업 인공지능 전환 연구에 착수한다. 총 403억원이 투입되는 이번 사업은 조선소에서 축적되는 설계·생산·품질 데이터를 활용해 초거대 산업 AI를 개발하고, 이를 실제 현장에 적용·검증하는 것이 핵심이다. 연구진은 설계 도면, 작업 지시서, 영상, 센서 데이터 등을 함께 학습하는 멀티모달 기반 파운데이션 모델을 구축해 선박 설계와 생산계획 등 주요 업무의 자동화·최적화를 추진할 계획이다.
2026-04-13 오후 3:45:57by 배종인 기자
-
IBS·UNIST·POSTECH, 2차원 반도체 양자광원 상온 발광 성능 높였다
기초과학연구원(IBS)과 UNIST, POSTECH 공동 연구진이 2차원 반도체 기반 양자광원의 상온 발광 성능을 높였다. 연구팀은 상온에서 쉽게 퍼지는 엑시톤을 나노홀 구조에 가두고, 열처리로 과잉 전하를 줄여 빛 방출 조건을 개선했다. 그 결과 엑시톤 구속 효율은 약 98%, 발광 효율은 기존 대비 약 130배 높아졌다. 연구 결과는 3월 13일 국제학술지 사이언스 어드밴시스에 게재됐다. 이번 성과는 극저온 의존도를 낮춘 광양자 소자와 상온 단일광자 광원 연구로 이어질 가능성을 보여준다.
2026-04-14 오전 10:14:06by 배종인 기자
-

재료연·UNIST, 폐글리세롤로 수소·포름산염 동시 생산 전기화학 시스템 개발
한국재료연구원과 UNIST 공동연구팀이 바이오디젤 부산물인 글리세롤을 활용해 수소와 포름산염을 함께 생산하는 전기화학 시스템을 개발했다. 연구팀은 기존 수전해의 산소발생반응 대신 글리세롤 산화반응을 적용한 음이온 교환막 전해 시스템을 구현했다고 밝혔다. 구리-코발트계 비귀금속 촉매를 써 1.31V에서 110mA/㎠를 기록했고, 포름산염 선택도는 약 96%, 79㎠ 대면적 셀에서도 안정적 구동 성능을 확인했다. 관련 연구는 2026년 3월 18일 국제학술지 줄(Joule)에 게재됐다.
2026-04-14 오후 2:21:26by 배종인 기자
.png)
관련 웨비나





많이 본 뉴스
[열린보도원칙] 당 매체는 독자와 취재원 등 뉴스이용자의 권리 보장을 위해 반론이나 정정보도, 추후보도를 요청할 수 있는 창구를 열어두고 있음을 알려드립니다.
고충처리인 장은성 070-4699-5321 , news@e4ds.com