[연재기획-피지컬 AI와 센서①]센서, 지능과 제어·안전을 연결하는 출발점
기사입력 2026.05.06 16:28
센서, 지능과 제어·안전을 연결하는 출발점
‘센서 데이터 제때 올바른 형태로 제어에 연결’이 경쟁력 기준
센서와 제어 사이를 잇는 ‘브리지’와·검증 체계’가 전면에 부상
센서와 제어 사이를 잇는 ‘브리지’와·검증 체계’가 전면에 부상
[편집자주]피지컬 AI 시대를 대표하는 휴머노이드 로봇을 중심으로, 센서가 단순 부품을 넘어 어떻게 시스템 경쟁력으로 재정의되고 있는지를 살펴본다. 1편에서는 휴머노이드 센서 설계가 왜 스펙 경쟁이 아닌 아키텍처의 문제가 되었는지 그 배경을 짚는다.
AI가 텍스트·이미지 같은 디지털 데이터를 해석하는 수준을 넘어, 현실 세계에서 직접 인식·판단·행동하는 ‘피지컬 AI(Physical AI)’로 확장되면서 센서의 위상도 달라졌다.
e4ds 뉴스는 지난해 10월 ‘[연재기획]피지컬 AI, 산업의 미래를 다시 그리다’를 통해 피지컬 AI를 센서·엣지 컴퓨팅·로봇·제어 시스템 등이 결합된 현실 세계와 상호작용하는 지능형 시스템으로 보고 피지컬 AI를 구현하기 위해서는 센서 등 인식 기술을 취재해 왔다.
그 틀에서 센서는 더 이상 ‘입력 장치’가 아니라, 지능(모델)과 연산(엣지), 구동(제어·액추에이터)을 하나의 폐루프로 묶는 출발점이자, 안전과 신뢰성의 전제조건이 된다.
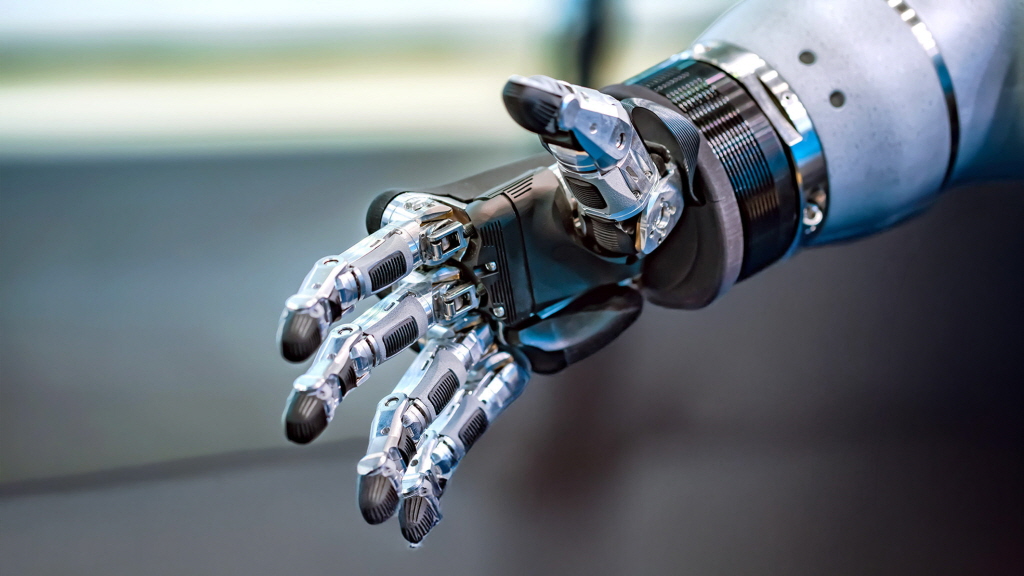
특히 휴머노이드 로봇은 피지컬 AI의 ‘통합 성적표’다.
사람을 위해 설계된 공간은 본질적으로 비정형적이어서, 외부 환경을 보는 카메라·라이다·레이더 같은 시각 계열 센서와, 로봇 자체 상태를 감지하는 IMU·힘/토크·촉각 센서가 동시에 작동해야 한다.
휴머노이드는 IMU, RGB-D 카메라, Force-Torque 센서, 촉각 센서, 마이크 등을 조합해 균형 유지·물체 조작·인간과의 상호작용을 수행한다.
반면에 현장에서는 “센서가 좋으면 된다”는 논리가 자주 무너진다.
센서마다 데이터가 놓이는 좌표계가 다르고, 시간축이 맞지 않으면(동기화 불일치) 아무리 정밀해도 제어 루프에서 의미를 잃는다.
네트워크·연산 지연, 데이터 품질(QoS), 기능 안전까지 겹치면서 논의의 중심은 ‘센서 개수 경쟁’에서 ‘센서 아키텍처’로 이동하고 있기 때문이다.
센서는 피지컬 AI의 자율성과 적응성을 확보하는 출발점이며, 여러 센서 데이터를 결합(센서 퓨전)해 더 정확한 인식과 판단을 수행한다.
자율주행차가 카메라·라이다·레이더·GPS를 함께 쓰는 이유도 ‘단일 센서의 한계를 상호 보완’하기 위해서다.
반면에 퓨전은 ‘합치면 좋아진다’로 끝나지 않는다.
센서 데이터는 AI 학습의 원재료이자, 충돌 회피·균형 제어처럼 즉각 반영돼야 하는 제어 입력이다.
결국 수집→전송→처리→의사결정→구동이 촘촘히 맞물려야 한다.
피지컬 AI 구현의 핵심으로 엣지·온디바이스 기반의 현장 즉시 처리(실시간 반응성 확보)를 짚는 배경도 여기에 있다.
전문가들에 따르면 피지컬 AI의 핵심을 두뇌(AI 모델), 감각(센서·비전), 신경망(연결·엣지 컴퓨팅을 통한 실시간 반응성), 행동(제어 시스템)으로 제시되고 있다.
휴머노이드에서는 이 네 요소가 분리된 부품이 아니라, 서로를 제약하며 돌아가는 하나의 시스템으로 작동한다.
이에 센서 자체의 스펙보다, ‘센서 데이터가 제때 올바른 형태로 제어에 연결되는지’가 경쟁력의 기준이 된다.
이 흐름을 단적으로 보여주는 사례가 반도체·플랫폼 기업들의 ‘아키텍처’ 전략이다.
▲사진 제공 : 인피니언
본지 3월17일자 ‘인피니언·엔비디아, 휴머노이드 로봇 개발 협력 확대’라는 기사를 살펴보면 인피니언이 엔비디아와 협력을 강화해 피지컬 AI용 시스템 아키텍처를 고도화하고, 로봇 설계부터 상용 배치까지 가속화하겠다고 전한 바 있다.
센싱·연산·구동·연결·에너지 관리가 유기적으로 결합돼야 휴머노이드가 실제 환경에서 안전하고 안정적으로 작동할 수 있다는 문제의식이다.
구체적으로는 센서와 제어 사이를 잇는 ‘브리지’와 ‘검증 체계’가 전면에 부상한다.
인피니언은 엔비디아 Holoscan 센서 브리지와 통합되는 MCU를 공급하고, Jetson Thor 모듈과 결합해 실시간 추론 성능과 확장성을 제공한다.
또한 가상 환경에서 센서·액추에이터의 디지털 트윈을 활용해 하드웨어 제작 이전 단계에서 동작과 인지 기능을 검증하고, NVIDIA Halos 안전 프레임워크와 연계해 하드웨어·소프트웨어 전반의 안전 설계를 지원한다는 설명도 나온다.
피지컬 AI 경쟁이 개별 부품이 아니라 플랫폼 통합으로 귀결되고 있다는 진단도 이어진다.
제조·물류 영역에서 피지컬 AI가 유연성과 적응성을 제공하며, 경쟁의 초점이 ‘개별 기술’보다 ‘통합’으로 이동하고 있다.
또한 이 통합의 첫 단추가 센서 아키텍처다.
센서가 만들어내는 데이터가 제때, 올바른 형태로, 안전하게 제어에 도달하지 못하면 엣지 컴퓨팅과 AI 모델, 액추에이터의 성능도 지연과 누적 오차 속에 묻히기 때문이다.
결국 휴머노이드 시대의 질문은 “누가 더 많은 센서를 달았는가”가 아니라, 감각을 판단으로, 판단을 행동으로 바꾸는 연결 고리를 얼마나 신뢰성 있게 설계했는가로 바뀌고 있다.
‘센서 아키텍처’는 좌표·시간·지연·품질·안전을 한 번에 다루는 시스템 설계 언어이며, 피지컬 AI가 산업 현장과 일상으로 확산될수록 그 중요성은 더 커질 전망이다.

관련뉴스
-

인피니언·엔비디아, 휴머노이드 로봇 개발 협력 확대
인피니언이 엔비디아와 함께 피지컬 AI를 위한 시스템 아키텍처를 고도화해, 로봇 설계부터 상용 배치까지 전 과정을 가속화할 계획이라고 밝혔다.
2026-03-17 오전 11:40:03by 배종인 기자
-
.jpg)
엔비디아, GTC 2026서 한국 산업계에 AI 적용 방향 제시
엔비디아가 GTC 2026 기간 중 국내 산업 관계자를 위한 ‘코리아 AI 엑스퍼트 데이’를 열고, 글로벌 AI 기술 흐름을 한국 산업 환경에 연결하는 자리를 마련했다. 행사에서는 젠슨 황 CEO의 GTC 기조연설 이후 공개된 기술 방향을 바탕으로 에이전틱 AI, 피지컬 AI, 디지털 트윈, GPU 인프라 구축 등이 주요 의제로 다뤄졌다. 참석자들은 반도체 공정, 스마트 팩토리, 자율 시스템 등 실제 산업 현장에 AI를 적용하는 방안을 놓고 질의응답과 패널 토론을 이어갔다. 엔비디아는 후속 개발자 프로그램도 이어갈 계획이다.
2026-03-27 오전 11:23:20by 배종인 기자
-

“피지컬 AI 데이터, 초고속 인터커넥트 기술로 해결”
AI가 클라우드에서 현실 세계로 확장되는 지금, 반도체 성능 경쟁의 무게중심은 연산기 자체에서 이를 연결하는 인터커넥트로 이동하고 있다. 피지컬 AI 시대의 승부처는 결국 얼마나 빠르고, 낮은 지연과 전력으로, 신뢰성 있게 데이터를 전달할 수 있는가에 달려 있다. 이런 가운데 지난 3월6일 서울 코엑스에서 열린 ‘e4ds Physical AI Frontier 2026’ 행사에서 퀄리타스반도체 김재영 상무이사가 ‘피지컬 AI 시대의 온디바이스 AI 반도체와 고속 인터커넥트 요소’를 주제로 발표하며, AI 성능을 좌우하는 고속 인터페이스 기술의 중요성을 강조했다.
2026-03-30 오전 9:54:30by 배종인 기자
-
“중소기업 ‘피지컬 AI’ 도입, 제조업 현장 이해한 전략적 설계에 달렸다”
‘e4ds Physical AI Frontier 2026’에서 e4ds news 배종인 편집국장은 ‘피지컬 AI 시장동향’을 주제로 발표하며, “피지컬 AI는 휴머노이드와 산업 자동화를 중심으로 빠르게 성장하고 있지만, 대기업과 중소기업 간 도입 격차는 여전히 크다. 중소기업이 대기업과의 격차를 좁히는 해법은 대규모 투자가 아니라, 현장을 이해한 전략적 설계에 있다”며 “중소기업이 성공하기 위해서는 우선 불량률, 가동률, 안전 등 핵심 KPI를 명확히 설정하고, 디지털 트윈과 시뮬레이션을 활용해 사전 검증을 거치는 것이 중요하다”고 밝혔다.
2026-03-30 오전 10:50:09by 배종인 기자
-

“피지컬 AI의 챗GPT 모먼트 온다”
‘e4ds Physical AI Frontier 2026’에서 마음AI 최홍섭 대표는 ‘피지컬 AI 가치사슬과 대한민국의 전략’이라는 주제로 발표하며, 생성형 AI가 디지털 영역을 넘어 물리적 세계로 확장되는 전환점이 임박했다고 진단했다. 최홍섭 대표는 “피지컬 AI의 출발점은 챗GPT”라며, 대규모 언어모델(LLM)이 로봇의 행동을 코드가 아닌 데이터 학습 기반으로 제어하는 패러다임 전환을 강조했다.
2026-03-30 오전 11:31:43by 배종인 기자
-
.jpg)
“피지컬 AI 시대, 안전은 ‘기능’ 아닌 ‘설계 기준’”
‘e4ds Physical AI Frontier 2026’ 행사에서 세이프틱스 김휘연 CSO는 ‘로봇 및 피지컬 AI에서의 안전 확보를 위한 기술적 대응’을 주제로 발표하며, 피지컬 AI 시대의 핵심 경쟁력이 더 이상 성능만이 아니라 사람과 함께 작동할 수 있도록 보장된 안전 기준에 있다고 강조했다.
2026-04-06 오후 3:56:05by 배종인 기자
-
.jpg)
“중소기업 로봇 성공 조건, 현실적 투자·검증된 파트너·단계적 확대”
‘e4ds Physical AI Frontier 2026’에서 이내형 Dobot Robotics 대표이사는 ‘제조업 자동화의 새로운 패러다임: 협동로봇 X 피지컬 AI’를 주제로 발표하며, 중소기업 자동화의 성패는 첨단 기술 자체보다 현장에 맞는 단계적 도입 전략에 달려 있다고 강조했다.
2026-04-06 오후 4:19:52by 배종인 기자
-

“카본식스 시그마킷, 제조현장 피지컬 AI 현실로 실현”
‘e4ds Physical AI Frontier 2026’ 콘퍼런스에서 카본식스의 서형주 CTO는 제조업 현장의 자동화 난제를 해결하는 핵심으로 자사 제품 시그마킷(Sigma Kit)을 제시했다.
2026-04-06 오후 4:53:11by 배종인 기자
-
.JPG)
[특집] ‘K-엔비디아’는 가능한가…딥엑스·퓨리오사AI·리벨리온의 성공조건
딥엑스·퓨리오사AI·리벨리온의 기술력과 상용화 전략, 엔비디아와의 격차, 데이터센터·피지컬 AI 시장 성공 조건을 종합 분석해 국산 AI 반도체의 미래를 짚어봤다.
2026-04-14 오후 10:19:00by 배종인 기자
-

[Tech tip!] 휴머노이드·피지컬 AI 개발, 좌표·시간부터 QoS·런치·로그·진단·기록까지 ‘운영 기준’ 점검 必
휴머노이드, 피지컬 AI 개발시 좌표계와 통신 설정, 운영 관측 체계가 정리되지 않으면 기능 구현과 별개로 시스템 통합이 지연될 수 있어 ROS 통합시 ‘운영 기준’ 점검이 요구되고 있다.
2026-04-28 오후 4:47:32by 배종인 기자
.png)
.png)
관련 웨비나





많이 본 뉴스
[열린보도원칙] 당 매체는 독자와 취재원 등 뉴스이용자의 권리 보장을 위해 반론이나 정정보도, 추후보도를 요청할 수 있는 창구를 열어두고 있음을 알려드립니다.
고충처리인 장은성 070-4699-5321 , news@e4ds.com